1. 页表操作 1.1 页表项定义 在上一篇博客中:用户态printf以及物理内存管理 | TimerのBlog (yanglianoo.github.io) 已经展示了页表项的组成:
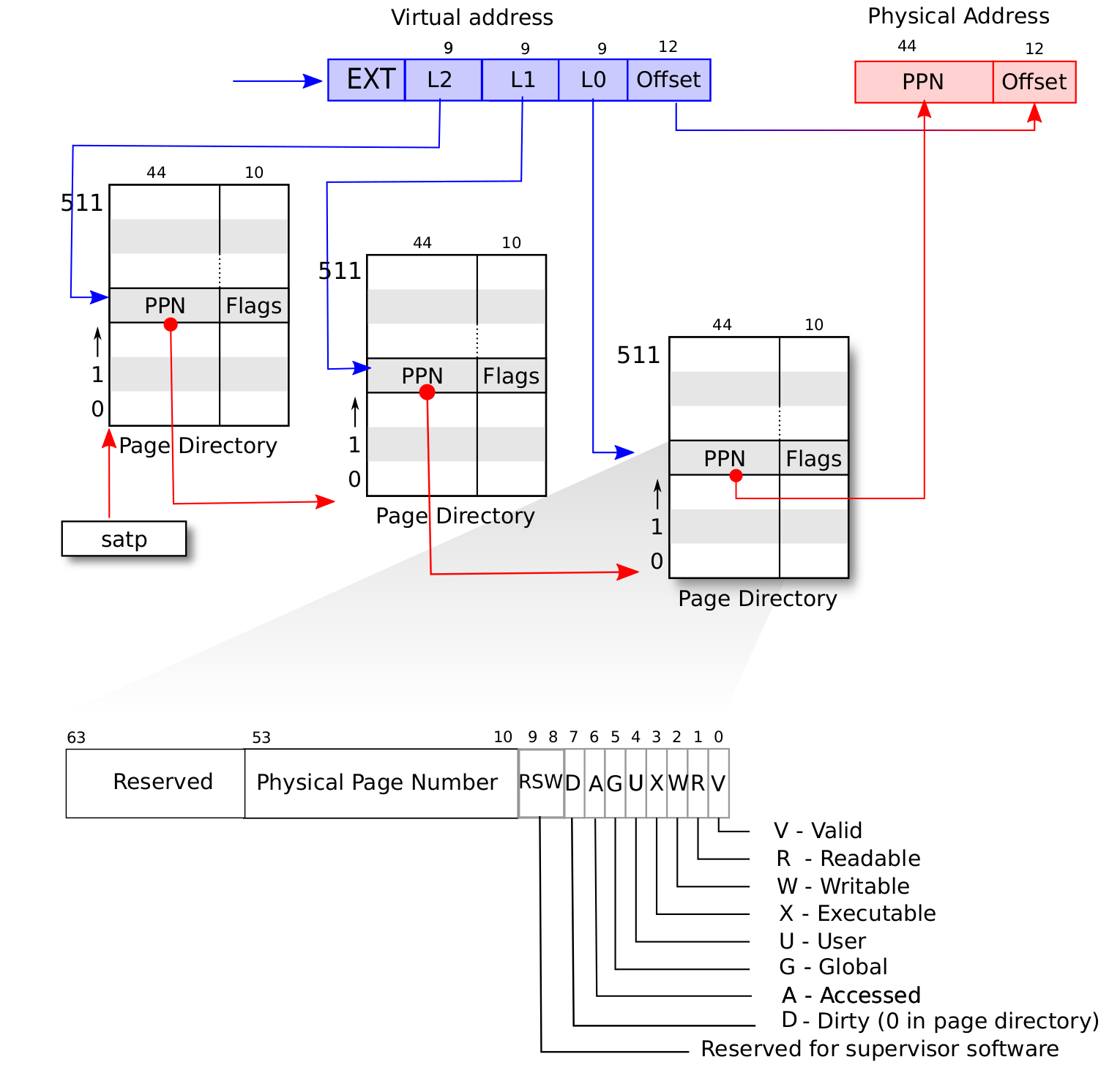
页表项 (PTE, Page Table Entry)是一个64bit的数据,其中低10位存储的是下级物理页的属性的标志位;10~54这44位存储的是下级页表的物理页号。
具体定义如下:在address.h中
typedef struct { uint64_t bits; }PageTableEntry;
然后定义标志位:定义在address.h中
#define PTE_V (1 << 0) #define PTE_R (1 << 1) #define PTE_W (1 << 2) #define PTE_X (1 << 3) #define PTE_U (1 << 4) #define PTE_G (1 << 5) #define PTE_A (1 << 6) #define PTE_D (1 << 7)
然后定义一些操作PTE的函数:在address.c中
PageTableEntry PageTableEntry_new (PhysPageNum ppn, uint8_t PTEFlags) { PageTableEntry entry; entry.bits = (ppn.value << 10 ) | PTEFlags; return entry; } PageTableEntry PageTableEntry_empty () { PageTableEntry entry; entry.bits = 0 ; return entry; } PhysPageNum PageTableEntry_ppn (PageTableEntry *entry) { PhysPageNum ppn; ppn.value = (entry->bits >> 10 ) & ((1ul << 44 ) - 1 ); return ppn; } uint8_t PageTableEntry_flags (PageTableEntry *entry) { return entry->bits & 0xFF ; } bool PageTableEntry_is_valid (PageTableEntry *entry) { uint8_t entryFlags = PageTableEntry_flags(entry); return (entryFlags & PTE_V) != 0 ; }
1.2 构造物理页帧的访问方法 假设我现在已经根据PTE拿到了物理页号,我要去访问此物理页号对应的物理帧的内存数据,因此需要定义了两个个辅助函数:
首先是以一个字节作为单位访问数据,拿到物理页号之后转换为对应的物理地址,得到的物理地址是此物理帧的开头,将其转换为一个uint8_t*类型的指针,这样根据此指针就可操作这一页的4096个字节了
uint8_t * get_bytes_array (PhysPageNum ppn) { PhysAddr addr = phys_addr_from_phys_page_num(ppn); return (uint8_t *) addr.value; }
然后假设物理页帧中存储的是一个个PTE,我现在需要去访问这一个个PTE。同样需要先拿到物理页号之后转换为对应的物理地址,然后将其转换为PageTableEntry*的指针就可以了
PageTableEntry* get_pte_array (PhysPageNum ppn) { PhysAddr addr = phys_addr_from_phys_page_num(ppn); return (PageTableEntry*) addr.value; }
2.虚实地址映射 2.1 rCore的内存映射实现
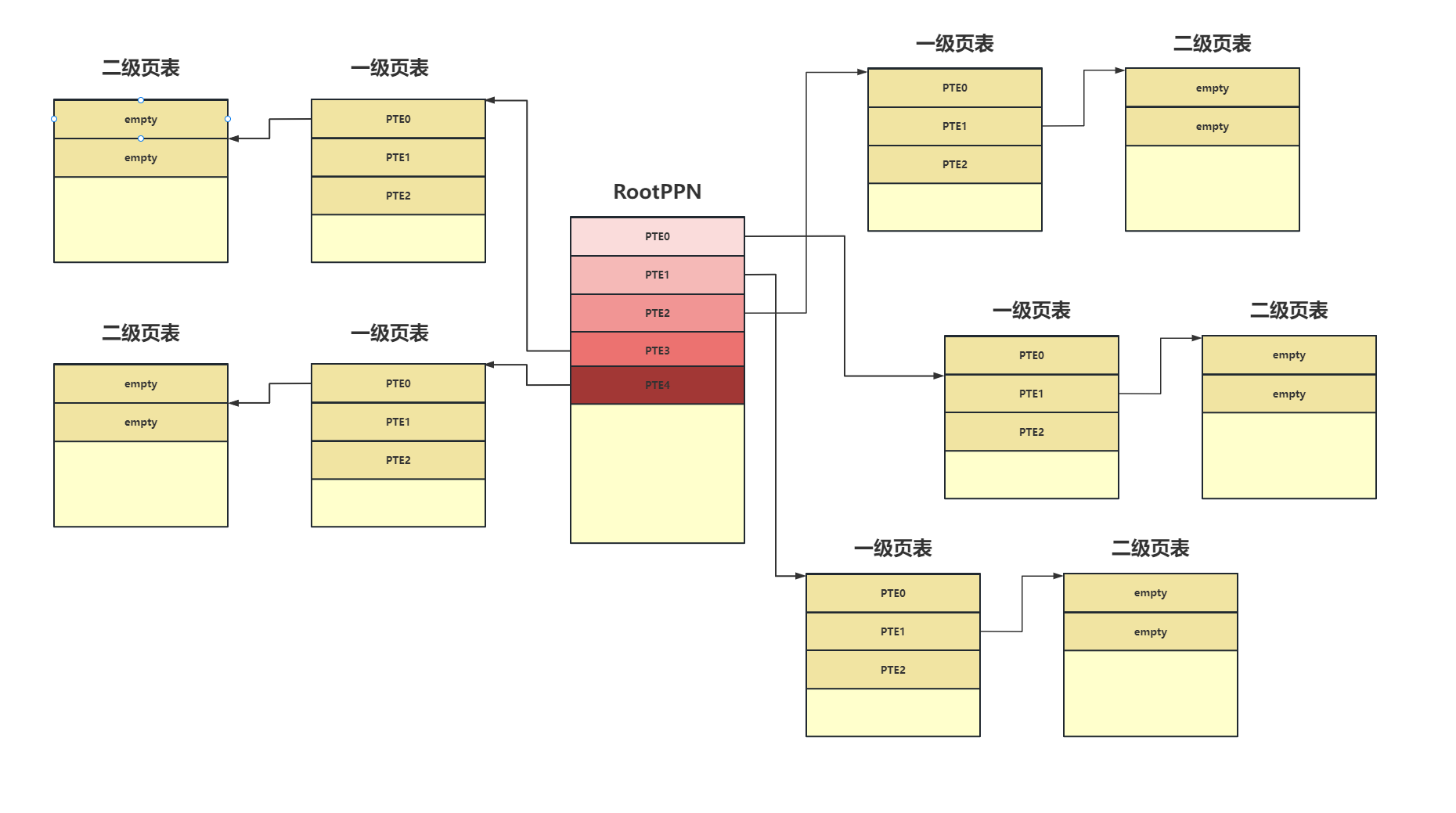
MMU在寻址时的流程如上图,先要拿到Virtual address的三级页号索引,定义如下的辅助函数:
void indexes (VirtPageNum vpn, size_t * result) { size_t idx[3 ]; for (int i = 2 ; i >= 0 ; i--) { idx[i] = vpn.value & 0x1ff ; vpn.value >>= 9 ; } for (int i = 0 ; i < 3 ; i++) { result[i] = idx[i]; } }
然后我们需要根据拿到的虚拟地址的三级页号索引来查找页表项,当然在最开始的时候多级页表的页表项里是没有数据的,这就需要我们去进行填充。
在这之前需要定义一个管理页表的结构体:每个应用的地址空间都对应一个不同的多级页表,这也就意味这不同页表的起始地址(即页表根节点的地址)是不一样的。因此 PageTable 要保存它根节点的物理页号 root_ppn 作为页表唯一的区分标志。此外,向量 frames保存了页表所有的节点(包括根节点)所在的物理页帧。
typedef struct { PhysPageNum root_ppn; Stack frames; }PageTable;
然后在来看查找页表项,填充页表项的操作:传入一个PageTable,根据此页表的根节点开始遍历,根节点的物理页号是保存在satp寄存器中的,从页表中根据虚拟地址的页表项索引来取出具体的页表项,如果此页表项为空,则分配一页内存,然后新建一个页表项进行填充。直到三级页表索引完毕,会返回虚拟地址最终对应的三级页表的页表项,此时三级页表的页表项是空的,在进行map时只需要对此页表项赋值就行。
PageTableEntry* find_pte_create (PageTable* pt,VirtPageNum vpn) { size_t * idx; indexes(vpn, idx); PhysPageNum ppn = pt->root_ppn; for (int i = 0 ; i < 3 ; i++) { PageTableEntry* pte = &get_pte_array(ppn)[idx[i]]; if (i == 2 ) { return pte; } if (!PageTableEntry_is_valid(pte)) { PhysPageNum frame = StackFrameAllocator_alloc(&FrameAllocatorImpl); *pte = PageTableEntry_new(frame,PTE_V); push(&pt->frames,frame.value); } ppn = PageTableEntry_ppn(pte); } }
PageTableEntry* find_pte (PageTable* pt, VirtPageNum vpn) { size_t * idx; indexes(vpn, idx); PhysPageNum ppn = pt->root_ppn; for (int i = 0 ; i < 3 ; i++) { PageTableEntry* pte = &get_pte_array(ppn)[idx[i]]; if (i == 2 ) { return pte; } if (!PageTableEntry_is_valid(pte)) { return NULL ; } ppn = PageTableEntry_ppn(pte); } }
find_pte_create 和find_pte基本一样,区别在于find_pte只会去查找页表项不会去创建。
有了上面这个函数,我们就可以建立虚实隐射关系了:只需要将你需要映射的物理页号与虚拟地址索引的三级页表中的页表项对应起来即可
void PageTable_map (PageTable* pt,VirtPageNum vpn, PhysPageNum ppn, uint8_t pteflgs) { PageTableEntry* pte = find_pte_create(pt,vpn); assert(!PageTableEntry_is_valid(pte)); *pte = PageTableEntry_new(ppn,PTE_V | pteflgs); }
然后还需一个解除映射的函数:先查找页表项,如果找到了就将其设为空就行了。
void PageTable_unmap (PageTable* pt, VirtPageNum vpn) { PageTableEntry* pte = find_pte(pt,vpn); assert(!PageTableEntry_is_valid(pte)); *pte = PageTableEntry_empty(); }
按逻辑上来说这里如果解除映射之后,应该需要释放掉对应的页内存才对
上面用到了一个assert函数,这是断言的宏,具体的实现如下,新增了一个assert.c和assert.h
#ifndef TOS_ASSERT_H #define TOS_ASSERT_H void assertion_failure (char *exp , char *file, char *base, int line) ;#define assert(exp) \ if (exp) \ ; \ else \ assertion_failure(#exp, __FILE__, __BASE_FILE__, __LINE__) #endif
#include <timeros/assert.h> #include <timeros/types.h> static void spin (char *name) { printk("spinning in %s ...\n" , name); while (true ) ; } void assertion_failure (char *exp , char *file, char *base, int line) { printk( "\n--> assert(%s) failed!!!\n" "--> file: %s \n" "--> base: %s \n" "--> line: %d \n" , exp , file, base, line); spin("assertion_failure()" ); }
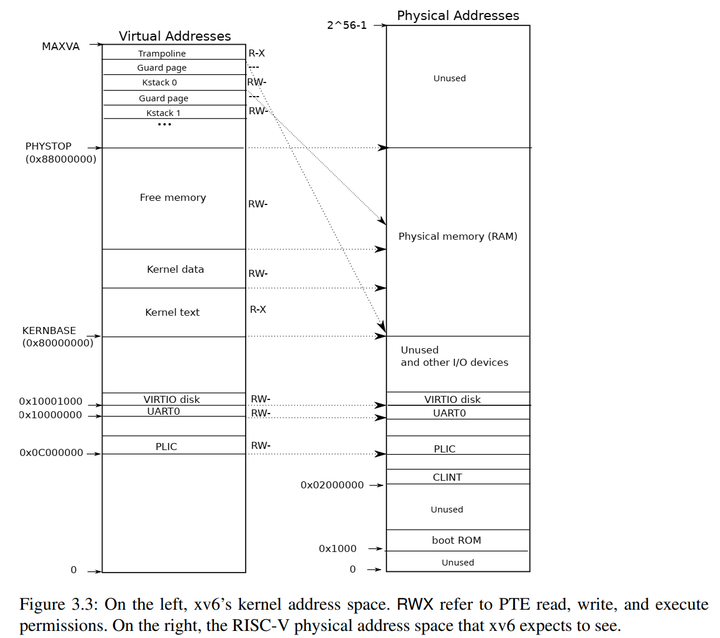
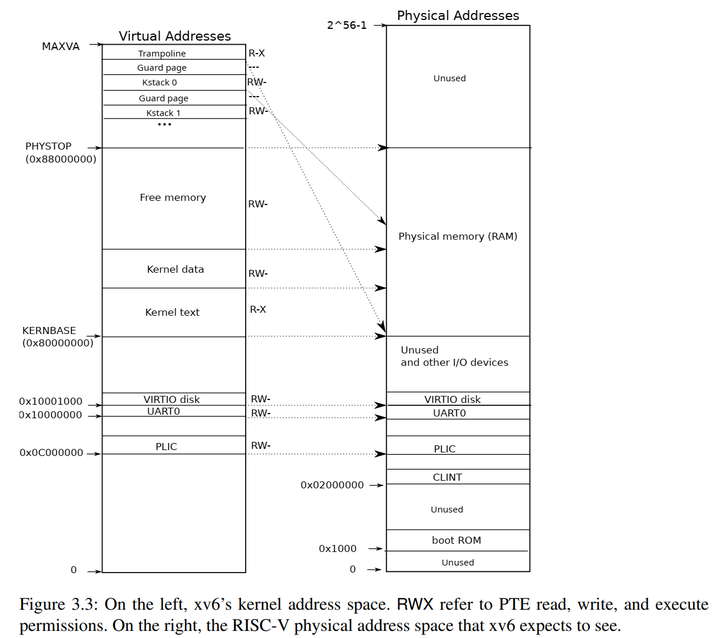
2.2 xv6的内存映射实现 xv6的内存映射代码实现在这里:xv6-riscv/kernel/vm.c at riscv · mit-pdos/xv6-riscv (github.com)
首先来看第一个函数kvmmake,在这个函数里先创建了一个根页表,为其分配一页内存,然后调用kvmmap函数来进行内存映射。这里建立的是恒等映射关系,把PHYSTOP以下的内存全部映射了,使用一个多级页表将内核的内存全部映射了。
pagetable_t kvmmake (void ) { pagetable_t kpgtbl; kpgtbl = (pagetable_t ) kalloc(); memset (kpgtbl, 0 , PGSIZE); kvmmap(kpgtbl, UART0, UART0, PGSIZE, PTE_R | PTE_W); kvmmap(kpgtbl, VIRTIO0, VIRTIO0, PGSIZE, PTE_R | PTE_W); kvmmap(kpgtbl, PLIC, PLIC, 0x400000 , PTE_R | PTE_W); kvmmap(kpgtbl, KERNBASE, KERNBASE, (uint64)etext-KERNBASE, PTE_R | PTE_X); c(kpgtbl, (uint64)etext, (uint64)etext, PHYSTOP-(uint64)etext, PTE_R | PTE_W); kvmmap(kpgtbl, TRAMPOLINE, (uint64)trampoline, PGSIZE, PTE_R | PTE_X); proc_mapstacks(kpgtbl); return kpgtbl; }
然后我们来看一下kvmmap的实现,它实际上会去调mappages函数
void kvmmap (pagetable_t kpgtbl, uint64 va, uint64 pa, uint64 sz, int perm) { if (mappages(kpgtbl, va, sz, pa, perm) != 0 ) panic("kvmmap" ); }
继续看mappages函数,此函数有五个参数,分别是:三级页表地址,需要建立映射的虚拟地址和物理地址,映射的内存大小,映射的内存的属性。这个函数干的事情就是根据虚拟地址遍历三级页表,如果没有映射就新建页表项填充,最后返回一级页表的页表项指针,最后对其赋值就完成了映射操作,这个函数就对应着在上面rCore中实现的map函数的逻辑,区别在于这里由于传入了一个映射内存的长度,所以在映射完一页内存后,虚拟地址和需要映射的物理内存地址都将向上增长一页继续映射,直到全部映射完成。查找和建立页表项的操作是在walk函数中完成的
int mappages (pagetable_t pagetable, uint64 va, uint64 size, uint64 pa, int perm) { uint64 a, last; pte_t *pte; if (size == 0 ) panic("mappages: size" ); a = PGROUNDDOWN(va); last = PGROUNDDOWN(va + size - 1 ); for (;;){ if ((pte = walk(pagetable, a, 1 )) == 0 ) return -1 ; if (*pte & PTE_V) panic("mappages: remap" ); *pte = PA2PTE(pa) | perm | PTE_V; if (a == last) break ; a += PGSIZE; pa += PGSIZE; } return 0 ; }
walk函数其实就对应着上面实现的find_pte_create函数,实现逻辑一摸一样
pte_t *walk (pagetable_t pagetable, uint64 va, int alloc) { if (va >= MAXVA) panic("walk" ); for (int level = 2 ; level > 0 ; level--) { pte_t *pte = &pagetable[PX(level, va)]; if (*pte & PTE_V) { pagetable = (pagetable_t )PTE2PA(*pte); } else { if (!alloc || (pagetable = (pde_t *)kalloc()) == 0 ) return 0 ; memset (pagetable, 0 , PGSIZE); *pte = PA2PTE(pagetable) | PTE_V; } } return &pagetable[PX(0 , va)]; }
参考链接

 微信
微信 支付宝
支付宝