1. QEMU中新增虚拟开发板
参考链接:基于qemu-riscv从0开始构建嵌入式linux系统ch2. 添加qemu仿真板——Quard-Star板 — 主页 (quard-star-tutorial.readthedocs.io)
本文主要参考了上面的博文,复现一下在qemu中自定义板卡的过程,用于个人学习。
前言:qemu内置支持了一些开发板,我们可以基于这些内置的板子来做操作系统等软件的配置,但是实际市面上很多板子qemu中是没有提供支持的,要是直接在硬件中进行软件验证会十分麻烦,还好qemu中可以支持用户自定义开发板,这样就可以虚拟的对开发板进行验证了。
在向qemu中注册自定义的板子需要向qemu中添加源码,然后重新编译,qemu源码安装的编译过程我的这一篇博客:从源码构建Qemu | TimerのBlog (yanglianoo.github.io)
我们添加的板子cpu架构为riscv,进入qemu源码的hw/riscv目录下,可以看到如下图中的文件,其中qemu官方默认添加了几个riscv板子,比如:virt,sifive,其中virt,这块虚拟板子也是最常用的虚拟板子,常用于作为基于riscv操作系统的原型验证,比如xv6,rvos都是基于qemu-virt构建的。
再进入include/hw/riscv目录,这里放着虚拟板卡的头文件:
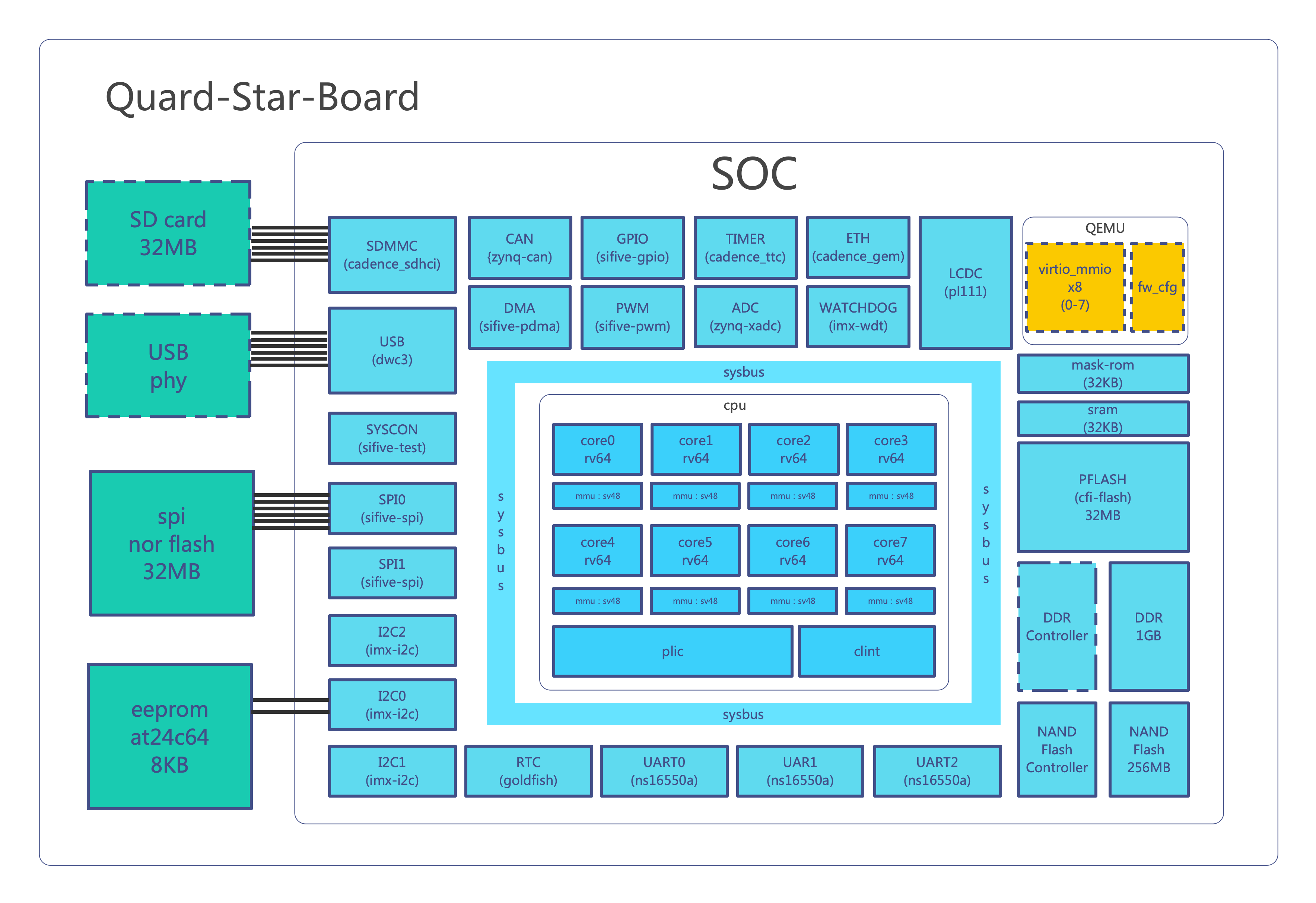
2.quard_star开发板的硬件资源 我们将自定义的开发板名字命名为quard_star,理论上这块板子的硬件资源你可以随便定义,开发板的资源如下:
我们的目标就是在qemu中创建这样一个开发板,需要依次在qemu中定义每一个硬件。接下来就来逐步添加每一个硬件
3.添加quard-star板子
声明:以下使用的qemu源码版本均为qemu-8.0.2,参考代码为qemu的virt这块板子的代码,我们需要先让qemu识别到quard-star这块板子,然后再逐渐丰富板子的外设。
注册quard-star板子需要修改如下几个文件:
`qemu-8.0.2/configs/devices/riscv64-softmmu/default.mak` `qemu-8.0.2/configs/devices/riscv32-softmmu/default.mak` `qemu-8.0.2/hw/riscv/meson.build` `qemu-8.0.2/hw/riscv/Kconfig`
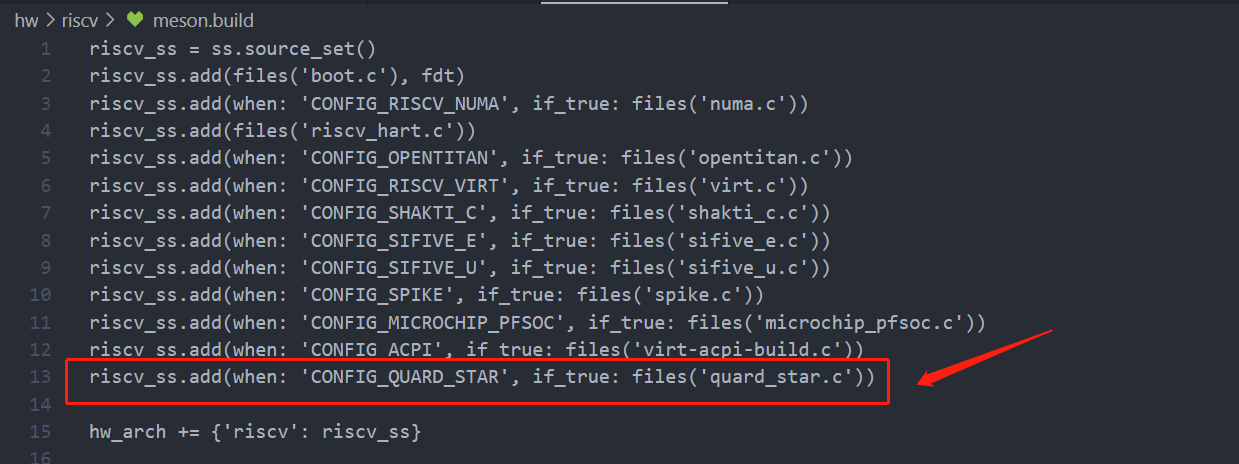
要在qemu中定义自己的虚拟板卡,需要在hw/riscv目录下增加一个和自己板子相关的.c文件,以及在include/hw/riscv目录下添加一个对应虚拟板子的.h文件,这里新增quard_star.c和quard_star.h文件,将其加入qemu编译体系内。
3.1 文件修改
qemu-8.0.2/hw/riscv/meson.build
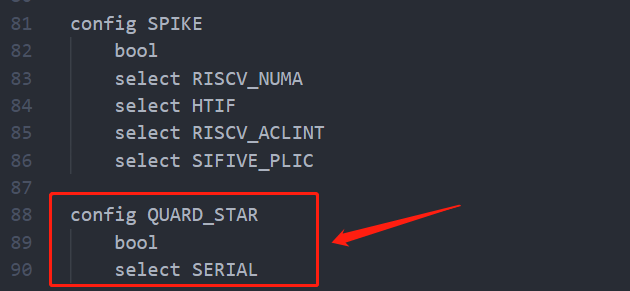
qemu-8.0.2/hw/riscv/Kconfig:这里只暂时只选中一个串口设备。
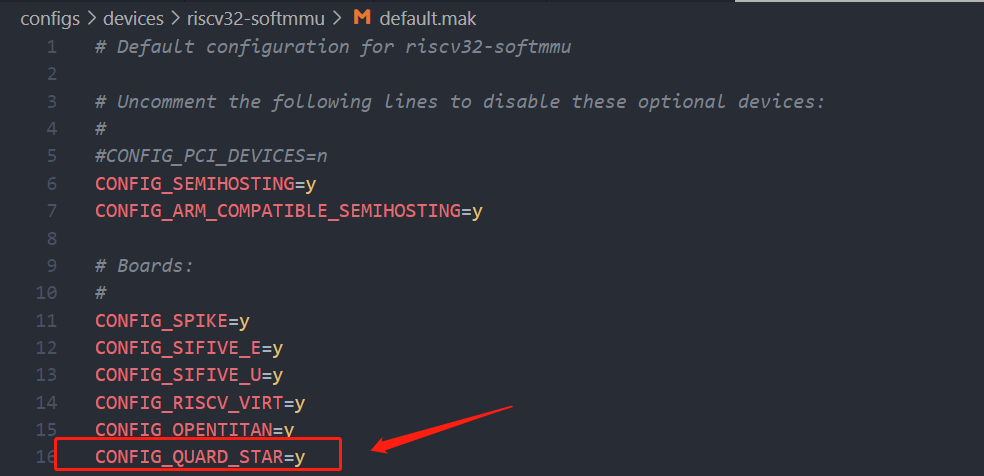
qemu-8.0.2/configs/devices/riscv32-softmmu/default.mak
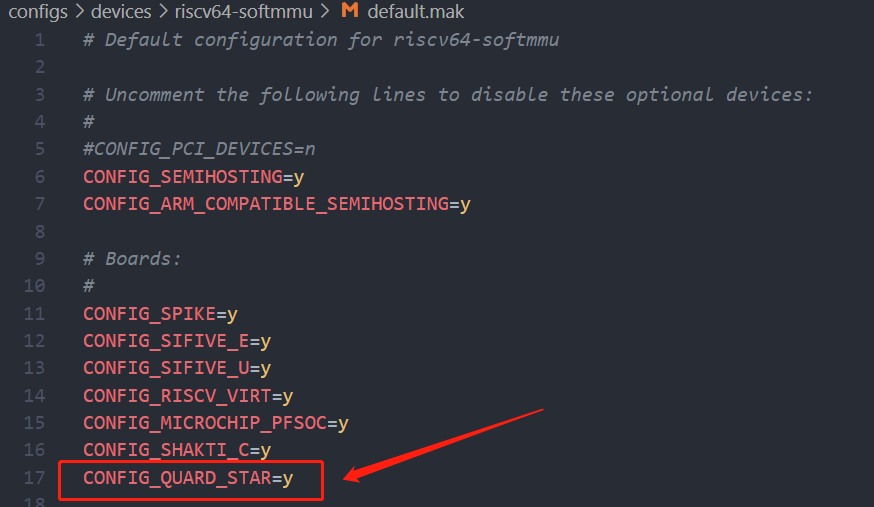
qemu-8.0.2/configs/devices/riscv64-softmmu/default.mak
3.2 添加源码 这里先把源码添加上去,后续慢慢分析,源码来自于文章开头参考的项目以及qemu中virt的源码。这里只定义了和初始化了MROM、SRAM、DRAM三种硬件。
3.2.1 quard_star.h #ifndef HW_RISCV_QUARD_STAR__H #define HW_RISCV_QUARD_STAR__H #include "hw/riscv/riscv_hart.h" #include "hw/sysbus.h" #include "qom/object.h" #include "hw/block/flash.h" #define QUARD_STAR_CPUS_MAX 8 #define QUARD_STAR_SOCKETS_MAX 8 #define TYPE_RISCV_QUARD_STAR_MACHINE MACHINE_TYPE_NAME("quard-star" ) typedef struct QuardStarState QuardStarState ;DECLARE_INSTANCE_CHECKER(QuardStarState, RISCV_VIRT_MACHINE, TYPE_RISCV_QUARD_STAR_MACHINE) struct QuardStarState { MachineState parent; RISCVHartArrayState soc[QUARD_STAR_SOCKETS_MAX]; }; enum { QUARD_STAR_MROM, QUARD_STAR_SRAM, QUARD_STAR_UART0, QUARD_STAR_DRAM, }; enum { QUARD_STAR_UART0_IRQ = 10 , }; #endif
3.2.1 quard_star.c #include "qemu/osdep.h" #include "qemu/units.h" #include "qemu/error-report.h" #include "qemu/guest-random.h" #include "qapi/error.h" #include "hw/boards.h" #include "hw/loader.h" #include "hw/sysbus.h" #include "hw/qdev-properties.h" #include "hw/char/serial.h" #include "target/riscv/cpu.h" #include "hw/riscv/riscv_hart.h" #include "hw/riscv/quard_star.h" #include "hw/riscv/boot.h" #include "hw/riscv/numa.h" #include "hw/intc/riscv_aclint.h" #include "hw/intc/riscv_aplic.h" #include "chardev/char.h" #include "sysemu/device_tree.h" #include "sysemu/sysemu.h" #include "sysemu/kvm.h" #include "sysemu/tpm.h" static const MemMapEntry quard_star_memmap[] = { [QUARD_STAR_MROM] = { 0x0 , 0x8000 }, [QUARD_STAR_SRAM] = { 0x8000 , 0x8000 }, [QUARD_STAR_UART0] = { 0x10000000 , 0x100 }, [QUARD_STAR_DRAM] = { 0x80000000 , 0x80 }, }; static void quard_star_cpu_create (MachineState *machine) { int i, base_hartid, hart_count; char *soc_name; QuardStarState *s = RISCV_VIRT_MACHINE(machine); if (QUARD_STAR_SOCKETS_MAX < riscv_socket_count(machine)) { error_report("number of sockets/nodes should be less than %d" , QUARD_STAR_SOCKETS_MAX); exit (1 ); } for (i = 0 ; i < riscv_socket_count(machine); i++) { if (!riscv_socket_check_hartids(machine, i)) { error_report("discontinuous hartids in socket%d" , i); exit (1 ); } base_hartid = riscv_socket_first_hartid(machine, i); if (base_hartid < 0 ) { error_report("can't find hartid base for socket%d" , i); exit (1 ); } hart_count = riscv_socket_hart_count(machine, i); if (hart_count < 0 ) { error_report("can't find hart count for socket%d" , i); exit (1 ); } soc_name = g_strdup_printf("soc%d" , i); object_initialize_child(OBJECT(machine), soc_name, &s->soc[i], TYPE_RISCV_HART_ARRAY); g_free(soc_name); object_property_set_str(OBJECT(&s->soc[i]), "cpu-type" , machine->cpu_type, &error_abort); object_property_set_int(OBJECT(&s->soc[i]), "hartid-base" , base_hartid, &error_abort); object_property_set_int(OBJECT(&s->soc[i]), "num-harts" , hart_count, &error_abort); sysbus_realize(SYS_BUS_DEVICE(&s->soc[i]), &error_abort); } } static void quard_star_memory_create (MachineState *machine) { QuardStarState *s = RISCV_VIRT_MACHINE(machine); MemoryRegion *system_memory = get_system_memory(); MemoryRegion *dram_mem = g_new(MemoryRegion, 1 ); MemoryRegion *sram_mem = g_new(MemoryRegion, 1 ); MemoryRegion *mask_rom = g_new(MemoryRegion, 1 ); memory_region_init_ram(dram_mem, NULL , "riscv_quard_star_board.dram" , quard_star_memmap[QUARD_STAR_DRAM].size, &error_fatal); memory_region_add_subregion(system_memory, quard_star_memmap[QUARD_STAR_DRAM].base, dram_mem); memory_region_init_ram(sram_mem, NULL , "riscv_quard_star_board.sram" , quard_star_memmap[QUARD_STAR_SRAM].size, &error_fatal); memory_region_add_subregion(system_memory, quard_star_memmap[QUARD_STAR_SRAM].base, sram_mem); memory_region_init_rom(mask_rom, NULL , "riscv_quard_star_board.mrom" , quard_star_memmap[QUARD_STAR_MROM].size, &error_fatal); memory_region_add_subregion(system_memory, quard_star_memmap[QUARD_STAR_MROM].base, mask_rom); riscv_setup_rom_reset_vec(machine, &s->soc[0 ], quard_star_memmap[QUARD_STAR_MROM].base, quard_star_memmap[QUARD_STAR_MROM].base, quard_star_memmap[QUARD_STAR_MROM].size, 0x0 , 0x0 ); } static void quard_star_machine_init (MachineState *machine) { quard_star_cpu_create(machine); quard_star_memory_create(machine); } static void quard_star_machine_instance_init (Object *obj) { } static void quard_star_machine_class_init (ObjectClass *oc, void *data) { MachineClass *mc = MACHINE_CLASS(oc); mc->desc = "RISC-V Quard Star board" ; mc->init = quard_star_machine_init; mc->max_cpus = QUARD_STAR_CPUS_MAX; mc->default_cpu_type = TYPE_RISCV_CPU_BASE; mc->pci_allow_0_address = true ; mc->possible_cpu_arch_ids = riscv_numa_possible_cpu_arch_ids; mc->cpu_index_to_instance_props = riscv_numa_cpu_index_to_props; mc->get_default_cpu_node_id = riscv_numa_get_default_cpu_node_id; mc->numa_mem_supported = true ; } static const TypeInfo quard_star_machine_typeinfo = { .name = MACHINE_TYPE_NAME("quard-star" ), .parent = TYPE_MACHINE, .class_init = quard_star_machine_class_init, .instance_init = quard_star_machine_instance_init, .instance_size = sizeof (QuardStarState), .interfaces = (InterfaceInfo[]) { { TYPE_HOTPLUG_HANDLER }, { } }, }; static void quard_star_machine_init_register_types (void ) { type_register_static(&quard_star_machine_typeinfo); } type_init(quard_star_machine_init_register_types)
3.3.3 源码分析 可以看见创建新的板子的流程为:
1.在quard-star.h中的QuardStarState结构体中为板子新建硬件,这些硬件表现在软件中为一个个的结构体,各种硬件结构体定义在hw/目录下,比如我现在只创建了CPU。
struct QuardStarState { /*< private >*/ MachineState parent; /*< public >*/ RISCVHartArrayState soc[QUARD_STAR_SOCKETS_MAX]; };
2.往static const MemMapEntry quard_star_memmap[]结构体数组中添加硬件的地址和映射的地址长度,注意这里的长度不能为0,不然会报错,其实这里DRAM的大小应该是qemu启动时需要用户输入的,例如-m 1G,这里暂不知道如何实现,所以指定了一个长度,不然会assert报错。MemMapEntry 结构体定义如下:
typedef struct MemMapEntry { hwaddr base; hwaddr size; } MemMapEntry;
3.创建硬件,比如我这里创建并初始化了ram和rom,新建了quard_star_memory_create函数。在函数的最后这里调用了一个很重要的函数 riscv_setup_rom_reset_vec,这个函数定义在boot.c中,函数主体如下:
参考链接:notes/多核启动基本逻辑 at master · wangzhou/notes · GitHub
参考链接:QEMU 启动方式分析(3): QEMU 代码与 RISCV virt 平台 ZSBL 分析 - 泰晓科技 (tinylab.org)
void riscv_setup_rom_reset_vec (MachineState *machine, RISCVHartArrayState *harts, hwaddr start_addr, hwaddr rom_base, hwaddr rom_size, uint64_t kernel_entry, uint64_t fdt_load_addr) { int i; uint32_t start_addr_hi32 = 0x00000000 ; uint32_t fdt_load_addr_hi32 = 0x00000000 ; if (!riscv_is_32bit(harts)) { start_addr_hi32 = start_addr >> 32 ; fdt_load_addr_hi32 = fdt_load_addr >> 32 ; } uint32_t reset_vec[10 ] = { 0x00000297 , 0x02828613 , 0xf1402573 , 0 , 0 , 0x00028067 , start_addr, start_addr_hi32, fdt_load_addr, fdt_load_addr_hi32, }; if (riscv_is_32bit(harts)) { reset_vec[3 ] = 0x0202a583 ; reset_vec[4 ] = 0x0182a283 ; } else { reset_vec[3 ] = 0x0202b583 ; reset_vec[4 ] = 0x0182b283 ; } if (!harts->harts[0 ].cfg.ext_icsr) { reset_vec[2 ] = 0x00000013 ; } for (i = 0 ; i < ARRAY_SIZE(reset_vec); i++) { reset_vec[i] = cpu_to_le32(reset_vec[i]); } rom_add_blob_fixed_as("mrom.reset" , reset_vec, sizeof (reset_vec), rom_base, &address_space_memory); riscv_rom_copy_firmware_info(machine, rom_base, rom_size, sizeof (reset_vec), kernel_entry); }
这段代码执行以下操作:
根据传入的参数,计算 start_addr 和 fdt_load_addr 的高 32 位(如果处理器不是 32 位的话)。
定义一个长度为 10 的 reset_vec 数组,用于存储复位向量的指令序列。
根据处理器是否为 32 位来设置不同的指令序列:
如果是 32 位处理器,使用 lw 指令来加载 a1 和 t0 的值。
如果是 64 位处理器,使用 ld 指令来加载 a1 和 t0 的值。
如果处理器的 ext_icsr 属性为假(即禁用了 Zicsr 扩展),则将复位向量的第 2 个指令替换为一个不压缩的 nop 指令(addi x0, x0, 0)。
将复位向量的指令按小端字节序进行拷贝。
使用 rom_add_blob_fixed_as 函数将复位向量的指令添加到固定地址的 ROM 中。
调用 riscv_rom_copy_firmware_info
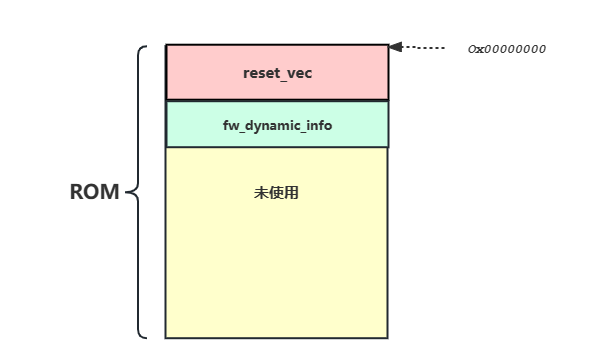
我们先来看最后先了调用rom_add_blob_fixed_as函数将reset_vec中的代码拷贝到rom的起始位置,板子上电后最先执行的指令就是ROM起始位置处的这些指令。
rom_add_blob_fixed_as("mrom.reset" , reset_vec, sizeof (reset_vec), rom_base, &address_space_memory);
然后调用riscv_rom_copy_firmware_info,我们来看看这个函数,定义在boot.c中:
void riscv_rom_copy_firmware_info (MachineState *machine, hwaddr rom_base, hwaddr rom_size, uint32_t reset_vec_size, uint64_t kernel_entry) { struct fw_dynamic_info dinfo ; size_t dinfo_len; if (sizeof (dinfo.magic) == 4 ) { dinfo.magic = cpu_to_le32(FW_DYNAMIC_INFO_MAGIC_VALUE); dinfo.version = cpu_to_le32(FW_DYNAMIC_INFO_VERSION); dinfo.next_mode = cpu_to_le32(FW_DYNAMIC_INFO_NEXT_MODE_S); dinfo.next_addr = cpu_to_le32(kernel_entry); } else { dinfo.magic = cpu_to_le64(FW_DYNAMIC_INFO_MAGIC_VALUE); dinfo.version = cpu_to_le64(FW_DYNAMIC_INFO_VERSION); dinfo.next_mode = cpu_to_le64(FW_DYNAMIC_INFO_NEXT_MODE_S); dinfo.next_addr = cpu_to_le64(kernel_entry); } dinfo.options = 0 ; dinfo.boot_hart = 0 ; dinfo_len = sizeof (dinfo); if (dinfo_len > (rom_size - reset_vec_size)) { error_report("not enough space to store dynamic firmware info" ); exit (1 ); } rom_add_blob_fixed_as("mrom.finfo" , &dinfo, dinfo_len, rom_base + reset_vec_size, &address_space_memory); }
可以看到这个函数初始化了一个fw_dynamic_info类型的结构体,这个结构体包含了下一阶段程序启动的地址、魔数、下一阶段CPU位于S态,初始化完毕后又调用rom_add_blob_fixed_as函数将fw_dynamic_info拷贝到rom的reset_vec之后,用于下一阶段的启动。在这里其实可以不用使用这个函数来传递设备树,后续需要我们自己来编写设备树然后编译,在下一阶段将固件中设备树的地址传给启动的下一阶段。
所以现在再来看上面reset_vec的代码,将上面的代码翻译一下如下,以32位的cpu为例:
reset_vec[0 ] = 0x00000297 ; reset_vec[1 ] = 0x02828613 ; reset_vec[2 ] = 0xf1402573 ; reset_vec[3 ] = 0x0202a583 ; reset_vec[4 ] = 0x0182a283 ; reset_vec[5 ] = 0x00028067 ; reset_vec[6 ] = start_addr; reset_vec[7 ] = 0 ; reset_vec[8 ] = fdt_load_addr; reset_vec[9 ] = 0 ;
具体来说,这段汇编代码完成了以下操作:
auipc t0, %pcrel_hi(fw_dyn):使用当前 PC(程序计数器)的高 20 位(相对于 fw_dyn 标签的偏移量)来设置 t0 寄存器的值。这里的fw_dyn就是储存在rom的fw_dynamic_info的地址了,此时PC=0x00000000.从汇编语意上看,这句的意思是,%pcrel_hi(fw_dyn)表示计算fw_dyn这个符号相对于当前PC的偏移 的高20bit,而auipc t0, imm表示把imm和当前PC相加,结果保存到t0。所以,这条指令整体上的结果是会将fw_dyn相对于pc的高20位地址取出然后拓展为32位与pc相加,得到的结果保存到t0。这里执行完毕后t0=0x00000000。addi a2, t0, %pcrel_lo(1b):使用当前 PC(相对于标签 1b 的偏移量)的低 12 位来设置 a2 寄存器的值。这个1b符号是啥我一直没搞懂,有没有大神告诉我,呜呜。看起来这两条指令的意思是将fw_dynamic_info的地址存到了a2中用于下一阶段启动的参数。csrr a0, mhartid:将处理器的硬件线程 ID(mhartid)存储到 a0 寄存器中。lw a1, 32(t0):从 t0 寄存器指向的地址偏移 32 处加载一个字(32 位)的数据到 a1 寄存器中。32(t0)的地址刚好是reset_vec,所以fdt的地址被送到了a1寄存器中,fdt为设备树的地址,这里还没定义。lw t0, 24(t0):从 t0 寄存器指向的地址偏移 24 处加载一个字(32 位)的数据到 t0 寄存器中。24(t0)的地址刚好是reset_vec[6],存储的是start_addr,这了传入的参数为flash的地址。jr t0:跳转到 t0 寄存器中保存的地址,即跳转到了flash处开始执行下一阶段的引导程序。
4.将所用创建硬件的函数用static void quard_star_machine_init包含起来,这里创建了CPU和主存。
static void quard_star_machine_init (MachineState *machine) { quard_star_cpu_create(machine); quard_star_memory_create(machine); }
5.注需要去初始化machine:创建static void quard_star_machine_class_init函数,并将machine结构体各个字段更新。
static void quard_star_machine_class_init (ObjectClass *oc, void *data) { MachineClass *mc = MACHINE_CLASS(oc); mc->desc = "RISC-V Quard Star board" ; mc->init = quard_star_machine_init; mc->max_cpus = QUARD_STAR_CPUS_MAX; mc->default_cpu_type = TYPE_RISCV_CPU_BASE; mc->pci_allow_0_address = true ; mc->possible_cpu_arch_ids = riscv_numa_possible_cpu_arch_ids; mc->cpu_index_to_instance_props = riscv_numa_cpu_index_to_props; mc->get_default_cpu_node_id = riscv_numa_get_default_cpu_node_id; mc->numa_mem_supported = true ; }
6.注册quard-star
static const TypeInfo quard_star_machine_typeinfo = { .name = MACHINE_TYPE_NAME("quard-star" ), .parent = TYPE_MACHINE, .class_init = quard_star_machine_class_init, .instance_init = quard_star_machine_instance_init, .instance_size = sizeof (QuardStarState), .interfaces = (InterfaceInfo[]) { { TYPE_HOTPLUG_HANDLER }, { } }, }; static void quard_star_machine_init_register_types (void ) { type_register_static(&quard_star_machine_typeinfo); } type_init(quard_star_machine_init_register_types)
3.3 文件夹目录变更 我原本qemu源码的目录为:
timer@DESKTOP-JI9EVEH:~/qemu/qemu-8.0.2/
修改文件夹名变为如下:将最上层的qemu目录重命名为了quard_star
timer@DESKTOP-JI9EVEH:~/quard_star/qemu-8.0.2/
然后在此目录下新建一个脚本文件用于编译qemu:
build.sh的内容如下:
# 获取当前脚本文件所在的目录 SHELL_FOLDER=$(cd "$(dirname "$0")";pwd) cd qemu-8.0.2 if [ ! -d "$SHELL_FOLDER/output/qemu" ]; then ./configure --prefix=$SHELL_FOLDER/output/qemu --target-list=riscv64-softmmu --enable-gtk --enable-virtfs --disable-gio fi make -j16 sudo make install cd ..
cd qemu-8.0.2:切换到 qemu-8.0.2 目录下。if [ ! -d "$SHELL_FOLDER/output/qemu" ]; then:如果目录 $SHELL_FOLDER/output/qemu 不存在,则执行下面的命令。./configure --prefix=$SHELL_FOLDER/output/qemu --target-list=riscv64-softmmu --enable-gtk --enable-virtfs --disable-gio:运行 configure 脚本,用于配置编译参数。这里指定了安装路径为 $SHELL_FOLDER/output/qemu,目标平台为 riscv64-softmmu,开启了 GTK 支持和 VirtFS 支持,禁用了 GIO 支持。fi:结束条件语句的块。make -j16:使用并发编译,编译生成目标文件。make install:将编译得到的目标文件安装到系统中。cd ..:切换回上一级目录。
执行完build脚本后,编译完成后的qemu位于output文件夹下,再创建一个脚本文件:
timer@DESKTOP-JI9EVEH:~/quard_star$ touch run.sh timer@DESKTOP-JI9EVEH:~/quard_star$ chmod +x run.sh
run.sh的内容如下:
SHELL_FOLDER=$(cd "$(dirname "$0 " ) " ;pwd ) $SHELL_FOLDER /output/qemu/bin/qemu-system-riscv64 \-M quard-star \ -m 1G \ -smp 8 \
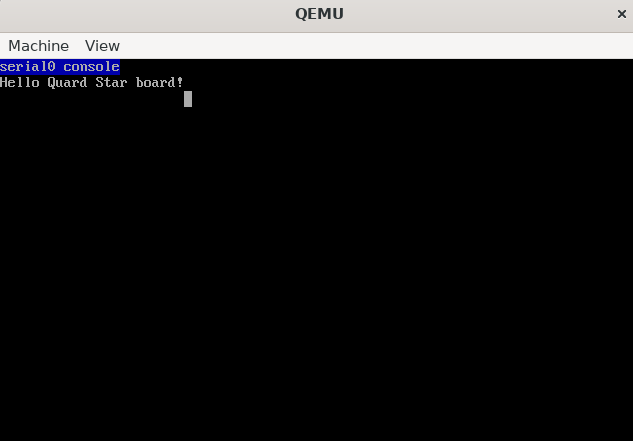
3.4 测试 运行脚本:
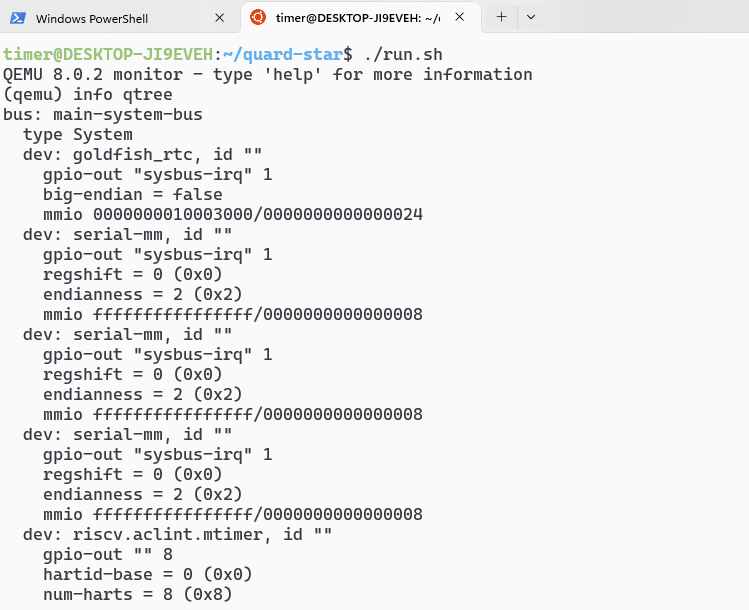
timer@DESKTOP-JI9EVEH:~/quard_star$ ./build.sh timer@DESKTOP-JI9EVEH:~/quard_star$ ./run.sh
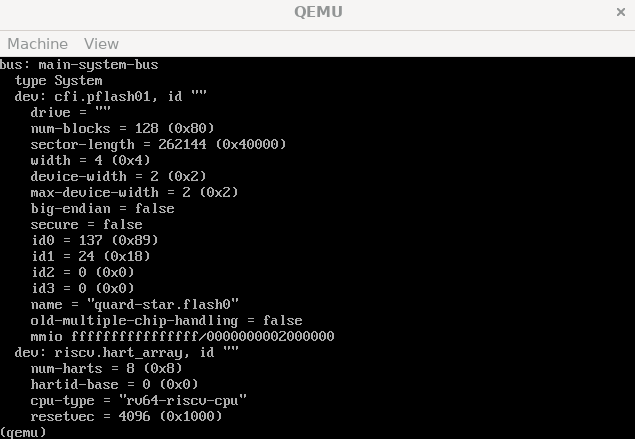
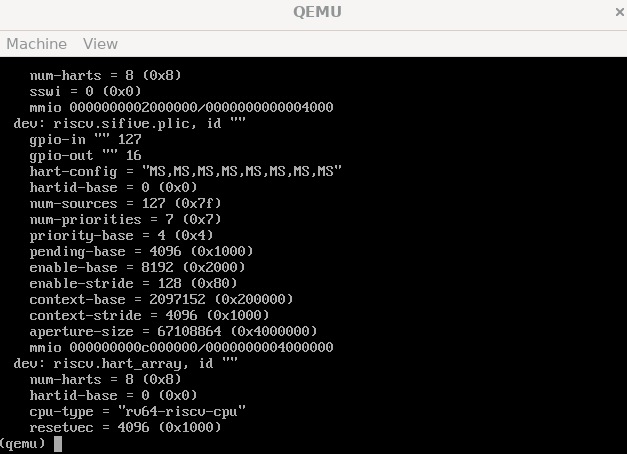
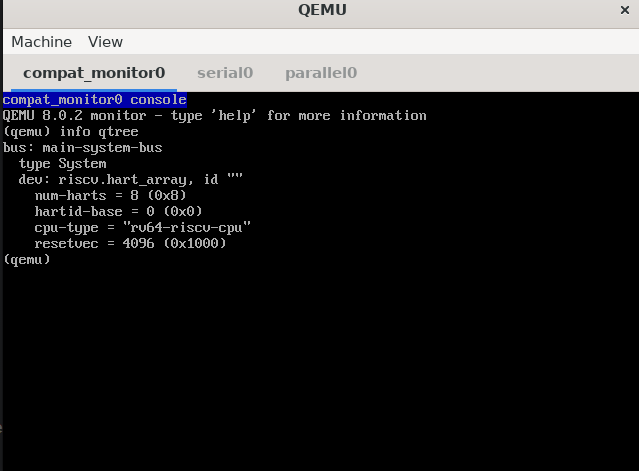
板子启动后在qemu的monitor界面输入info qtree就可看见quard-star的硬件信息,如下:
这里我们只为quard-star板子创建了主存。
源码地址:yanglianoo/quard-star: 从零基于qemu创建riscv嵌入式开发板,并移植操作系统 (github.com)
有问题请与我联系:wechat:13699648817


 微信
微信 支付宝
支付宝